开关电源数字控制
相关参考链接
1 数字控制开关电源的重要内容
| 1 | 采样时间点对滞后的影响(零阶保持器),ADC采样点与相位优化的关系 |
|---|---|
| 2 | 控制带宽频率与开关频率的关系(为什么是五倍的关系) |
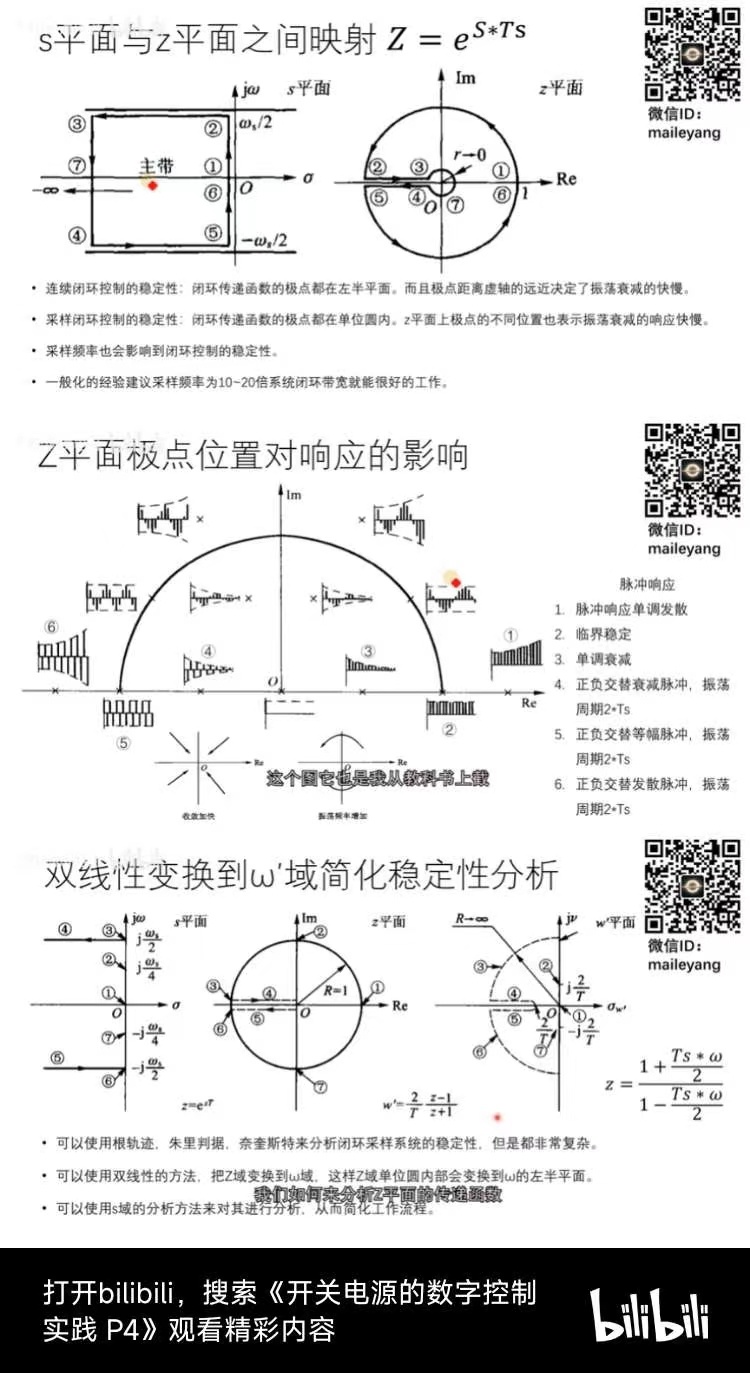
| 3 | s平面与z平面的映射关系 |
| 4 | 使用梯形积分法将s域传递函数变为z域传递函数,之后差分化变为代码。在Z域下直接设计补偿控制器。 |
| 5 | Z变换到代码中的具体操作 |
| 6 | MATLAB的sisotool工具、c2d工具等使用 |
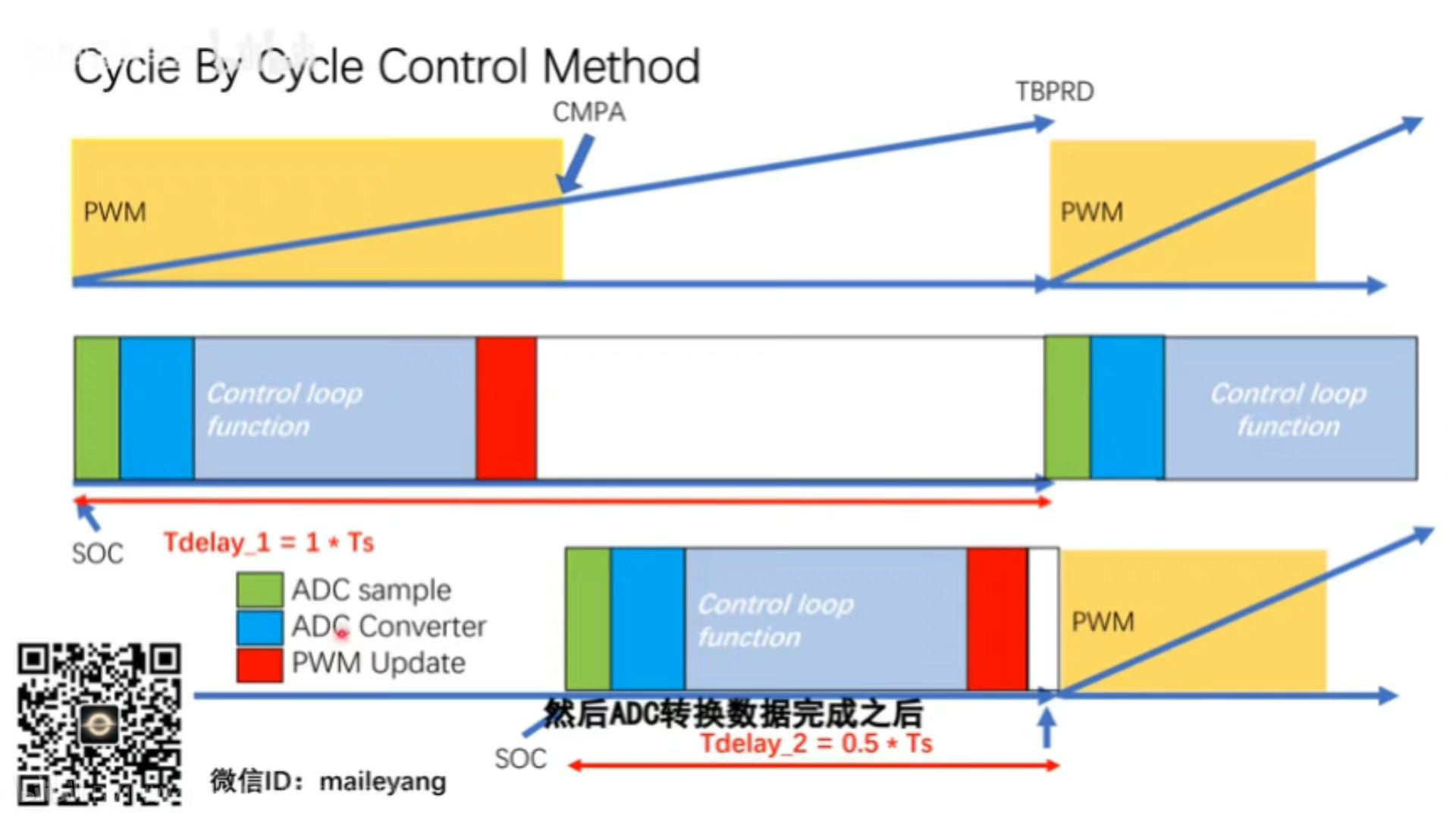
2 采样时间点对滞后的影响(零阶保持器),ADC采样点与相位优化的关系
计算$fx$频率下的相位余量公式为:
| $Fx$为采样频率 | $Kd$为延迟周期比例 |
|---|---|
在$Fs=100KHz$与$fx=20kHz$的情况下计算。
在PWM周期开始采样,$Kd=1$,计算相位在20KHz滞后$72^{o}$。
在PWM周期一般开始采样,Kd=0.5,计算相位在20KHz滞后$36^{o}$。
应该尽可能的在PWM周期中后段触发ADC采样,可以有利于系统稳定性,提高相位余量。
数字控制的延时问题
就是如果采样频率等于开关频率,在环路中会引入$540^{o}$的相位滞后,也就是说,在开关频率处会引入540度的相位滞后!即使截止频率是开关频率的$\frac{1}{10} $,光是数字控制在截止频率处也会引入54度的相位滞后,其实也很难补偿回来了。所以说,在数字控制下,为了保持控制系统有足够的相角裕度,其截止频率会更低一些,从而减小数字控制引入的相角滞后的影响。当然还有一种办法是提高采样频率,现在我们做逆变器一般采样频率是开关频率的两倍。这也是为了减小数字控制造成的延迟。
3 控制带宽频率与开关频率的关系(为什么是五倍的关系)
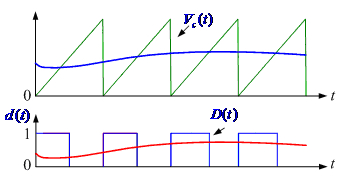
假设一个电力电子变换器开关频率为100k,调制波频率为10k,那么经过PWM环节得到占空比,状态空间平均法认为得到的占空比也是一个10k的交流信号(如图2所示的红线),即PWM环节等效为一个比例环节。但实际上不完全是这样的,对占空比做傅里叶分析,可以知道占空比中除了10k的分量外,还有90K,110K,190K……的分量,那么状态空间平均法的准确度就依赖于这些非基波分量的抑制程度,显然,带宽越低,对这些非基波频率的分量抑制能力越强,状态空间平均法得到的模型就越准确。这是电力电子变换器环路截止频率为开关频率的1/5~1/10的重要原因之一,当环路截止频率超过开关频率的1/5以后,用状态空间平均法得出的模型就和实际模型差距比较大了。
4 s域和z域的映射关系
基础知识部分
首先对于是一个负反馈来说。极点必须位于s平面的左半平面的原因是:对于负反馈系统的话,假设分母为$(s+p1) (s+p2)$可知极点为$p1 p2$的,经过拉式反变换。
最后变换出的输出量中有含有乘法$e^{-pt}$,此时只有p满足在S左半平面,当$t\to\infty $时有$e^{-pt}\to0$,此时系统误差可趋向于0,因此系统稳定。
首先B站视频图像化展示s域z域的关系
5 z变换实操案例
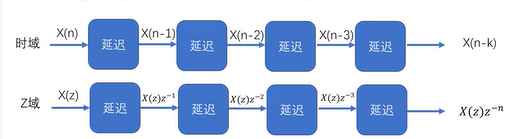
基础知识1 z变换
序列$x(n)$的z变换为$X(z)$,序列$y(n)=x(n-1)$的z变换为$Y(z)$
$K=n-1$代入变为
经整理得
可以如下图进行展示
基础知识2 梯形积分法的Z变换相关公式
计算实例
步骤1获取目标同步函数
将s代入
进行因式分解
上下同时乘$z^{-3}$即为时间向前移动3个延时
步骤2归一化
归一化的目的为使得$A_{0}=1$,将$H_{Z}[z]$上线同乘$\frac{1}{w_{Z1}w_{Z2}((2T^{2}w_{P1}+4T)w_{P2}+2T w_{P1}+8)}$然后就可以得到下式:
步骤3 最终结果
由上面可知手动离散化的过程是痛苦漫长的,但是可以用MATLAB中的
matlab为连续系统提供了离散化模型。利用$c2d()$函数可实现连续函数的快速离散化。$c2d()$函数的调研格式为:
式中,$sysd$为采样时间$Ts$的离散时间模型;输入参量$sys$为连续时间模型对象;$Ts$为采样周期。$Method$用来指定离散化采用的方法:
| $zoh$ | 采用零阶保持器法,零阶保持器的作用是在信号传递过程中,把第nT时刻的采样信号值一直保持到第(n+1)T时刻的前一瞬时,把第(n+1)T时刻的采样值一直保持到(n+2)T时刻,依次类推,从而把一个脉冲序列变成一个连续的阶梯信号。因为在每一个采样区间内连续的阶梯信号的值均为常值,亦即其一阶导数为零,故称为零阶保持器; |
|---|---|
| $foh$ | 采用一阶保持器法,与上面不同的是,在信号传递过程中,两个相邻采样点之间的信号是一阶函数,起点和终点的值分别等于前后两个采样点的值则 |
| $tustin$ | 采用双线性变换法 |
| $prewarp$ | 采用改进的双线性变换法 |
| $matched$ | 采用零极点匹配法 |
默认为$zoh$。
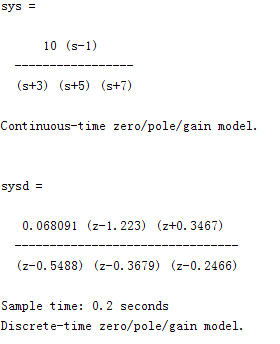
基$MATLAB$的的例子:求下式的$Z$变换:

步骤4 差分化
已知
经化解可得
可得最终差分化所得的差分方程:运行在处理器中
y是控制量 x是误差 下标为多少周期前