1 推挽开关电源
1.1 推挽拓扑
1.1.1 基本原理
推挽拓扑如图1.1 所示,其主变压器T1包含多个次级烧组。每个次级绕组都产生一对相位互差 180°的方波脉冲,脉冲幅值由输人电压以及初次级绕组匝数比决定。 所有次级绕组的脉冲宽度都相同,均由主输出回路的负反馈控制电路决定。在推挽电路中,开关管Q1和 Q2由两个相等的脉宽可调,相位互差180”的脉冲驱动。另外两个次级绕组$N_{s1}$和 $N_{s2}$为辅输出。 除此之外,存在开关管的导通压降$V_{ce}$,本文中设为1V。因此,当任意一个开关管导通时,对应半个初级绕组上的方波电压为$V_{dc}-1$
变压器次级侧是一个导通时间为$T_{on}$其值为最大为0.4、电压幅值为$[(V_{dc}-1 )(\frac{N_{s}}{N_{p}})-V_{d} ]$的平顶方波。此处$V_{d}$为次级侧二极管的正向压降。
| 物理量 | 公式 |
|---|---|
| 输出电压$V_{m}$ | $[(V_{dc}-1 )(\frac{N_{s}}{N_{p}})-1 ]\frac{2T_{on}}{T}$ |
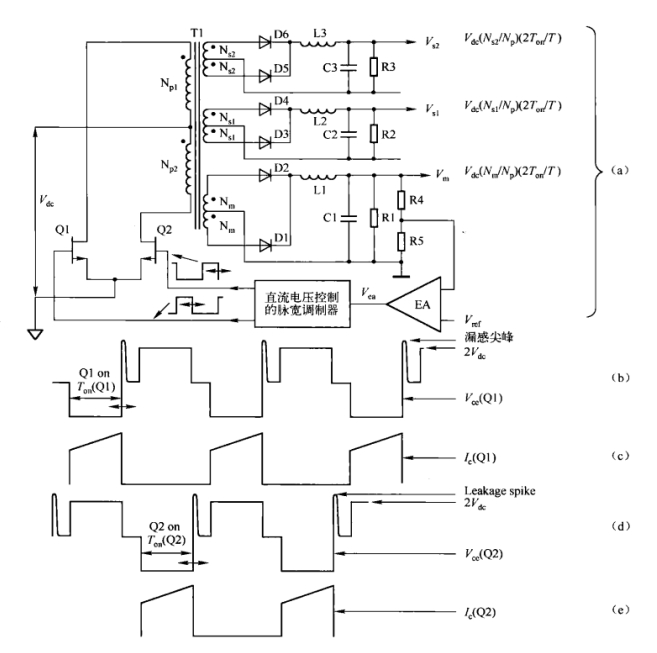
图 1.1 推挽电路原理图
1.1.2 辅输出的负载调整率
从图1.1可以主输出电压是有一个负反馈用于调节。但是,辅助输出端的没有负反馈。故在运行时为了保持辅输出电压的稳定,应该使得包括主电感在内的各个电感保持CCM( continuous current mode )模式。
在CCM模式下,输出电压可以稳定在±5%~±8%的范围内
1.1.3 辅电压输出
加个LDO用于进一步保持电压稳定
1.1.4 主输出电感的最小电流限制
通常情况下,不允许主输出电感电流遗入不连续工作模式。因为往往电流反馈值是斜坡中值,主电感进入DCM模式时电流反馈值会不稳定,造成控制上的难度。通常,最小电感电流值应为额定值的$\frac{1}{10} $
——K.B. 推挽变换器是最传统的拓扑结构之一,但设计中依然经常用到。这种拓扑能够实现多路输出,并且可以实现直流隔离。输出电压既可以高于输入电压,也可以低于输入电压。当输入电压和负载波动时主输出电压可以得到很好的调节。在CCM模式下,主输出电压能保持较高的电压调整率。当负载发生变化时,只要辅输出电感电流不进入不连续模式,辅输出电压调整率也能控制在 5%以内。
1.1.5 推挽拓扑中的磁通不平衡问题(偏磁饱和现象)
设计者还应该注意到推挽拓扑中另一种更为潜在的失效模式——由变压器磁通不平衡引起的偏磁面导致磁心饱和问题。
如图1.2所示。 正常工作时,磁心的磁通变化范围位于所示的$B_{1}$和$B_{2}$之间。磁心必须工作在磁滞回线(弯曲区)±2000G以内的线性部分。频率为25kHz左右时,磁心损耗很小,磁通允许在±2000C 范图内变化。但是,随着频率的上升.磁心损耗会迅速增大,此时磁峰下降。

图 1.2
| Q1导通时施加在$N_{p1}$的伏秒数与Q2 导通时施加在的$N_{p2}$伏秒数是否相等 | 后果 |
|---|---|
| 相等 | 每个周期后磁心复位 |
| 不相等 | 但只要伏秒数稍有不等,磁心就不能回到起点,若干周期后,磁心将偏离磁滞回线进人饱和区。磁心饱和时,变压器不能承受电压,当下一周期开关管再次导通时,开关管将承受很大的电压和电流,导致开关管损坏 |
很多原因都可能引起”导通伏秒数“与“关断伏秒数”不相等
1.1.6 磁通不平衡时的损坏工作逻辑
| 步骤 | 详细描述 |
|---|---|
| 第一步 | 当磁通不平衡时,每周期磁心慢慢偏离平衡点 |
| 第二步 | 如果开始时只有0.01%的磁通不平衡(实际情况会比这更严重).只需10000个周期,磁通就会从最低的起始点偏移到饱和点 |
1.1.7 磁通不平衡测试
| 目的 | 磁通不平衡危险程度的简单测试方法 |
|---|---|
| 如何人为产生磁通不平衡 | 将一个二极管$D_{1}$(压降约1V)与变压器初级半绕组的一端串联,绕组导通时,与二极管串联的半绕组上的压降比另一个半绕组的压降低1V,这样就人为地产生了伏秒数不平衡。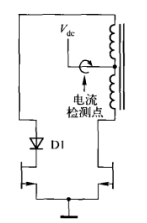 |
1.1.8 磁通不平衡解决方案
| 方法 | 详细说明 |
|---|---|
| 加气隙 | 磁心加上气隙后,使磁滞回线的斜率变小,从而磁心可以承受更大的电流偏置。在大功率场合经常用到气隙,但缺点是减小了励磁电感,为了放置电流的DCM模式,所以不得不增加临界电流。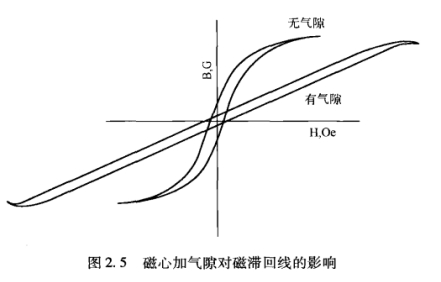 |
| 串初级电阻 | 当出现磁通不平衡时,伏秒数较大的初级半绕组流过较大电流。这个电流使绕组电阻压降增大,降低了该初级半绕组的伏秒数,从而使电流恢复平衡。这样做势必会增加报耗,降低效率。 |
| 换成电流行拓扑 | 最佳方法 |
